Eigenvalues and eignevectors
$$ \bbox[yellow,5px]
{
如果 Ax = \lambda x \\
则有(A+3I)x = (\lambda + 3)x \\\\
det[A-\lambda I] = 0 \\
矩阵的迹 \; trace = \lambda_1 + \lambda_2+...+\lambda_n \\\\\\
矩阵的行列式:det A = \lambda_1 \lambda_2...\lambda_n
}
$$
Eigenvalues and eignevectors
$$ \bbox[yellow,5px]
{
如果 Ax = \lambda x \\
则有(A+3I)x = (\lambda + 3)x \\\\
det[A-\lambda I] = 0 \\
矩阵的迹 \; trace = \lambda_1 + \lambda_2+...+\lambda_n \\\\\\
矩阵的行列式:det A = \lambda_1 \lambda_2...\lambda_n
}
$$
向量正交和子空间正交
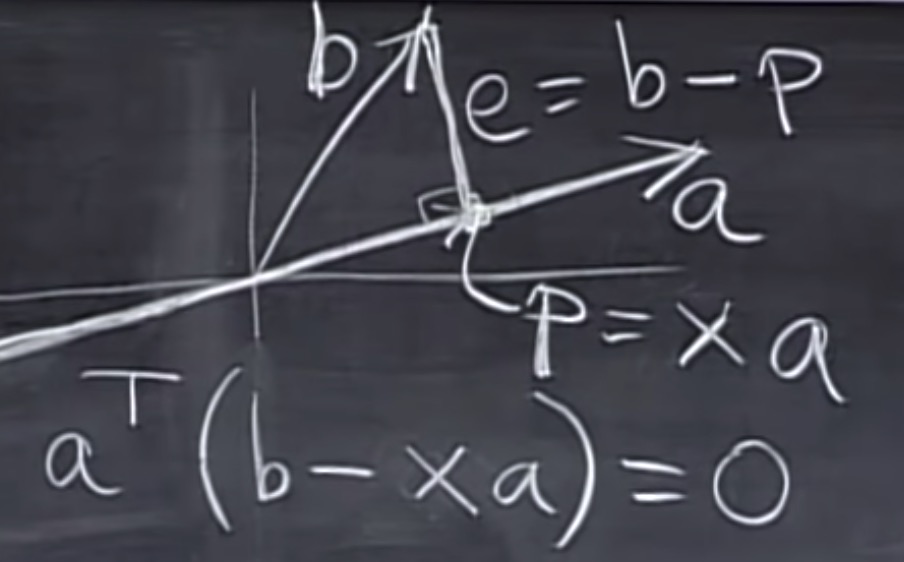
Ax=b及最小二乘法
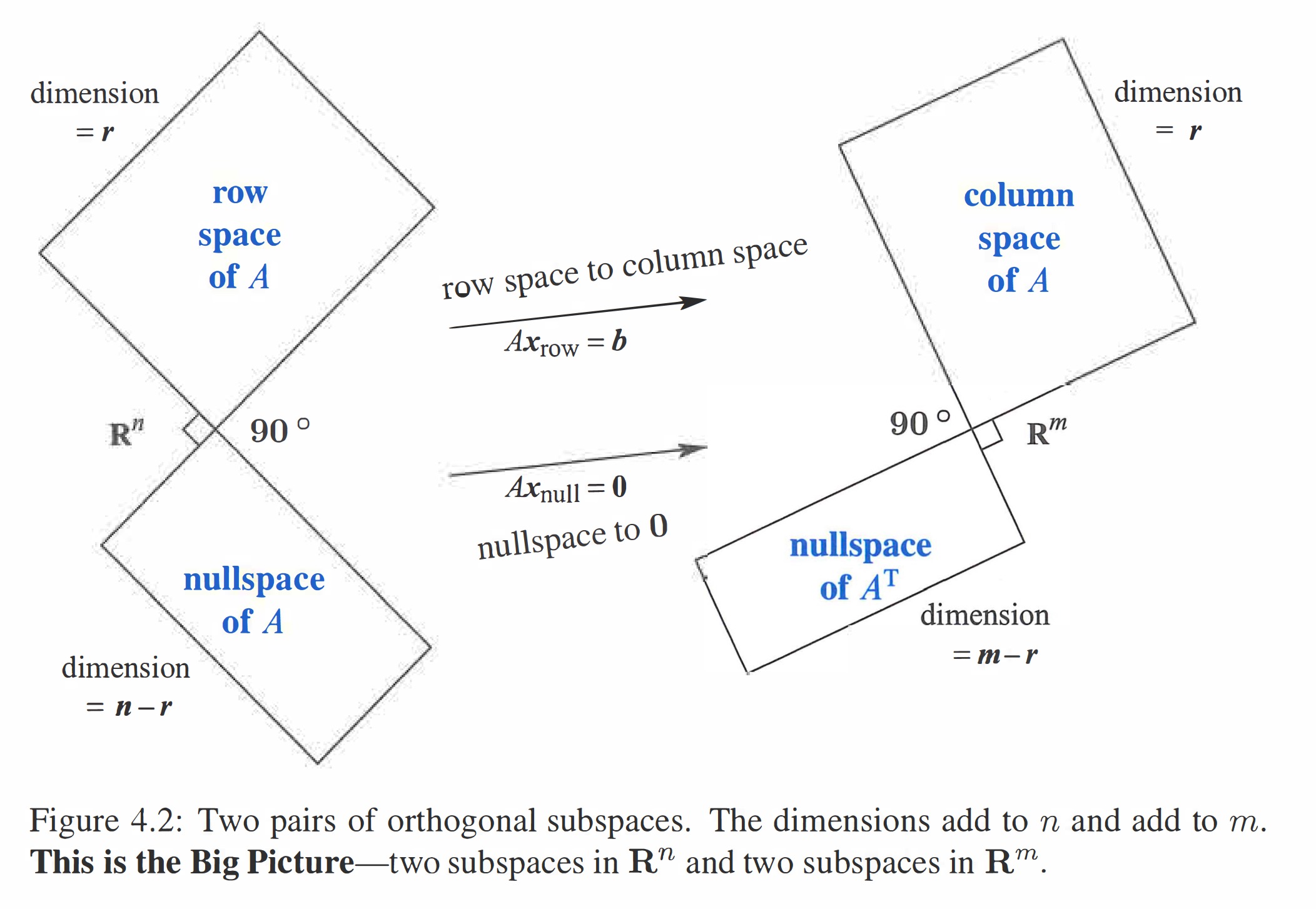
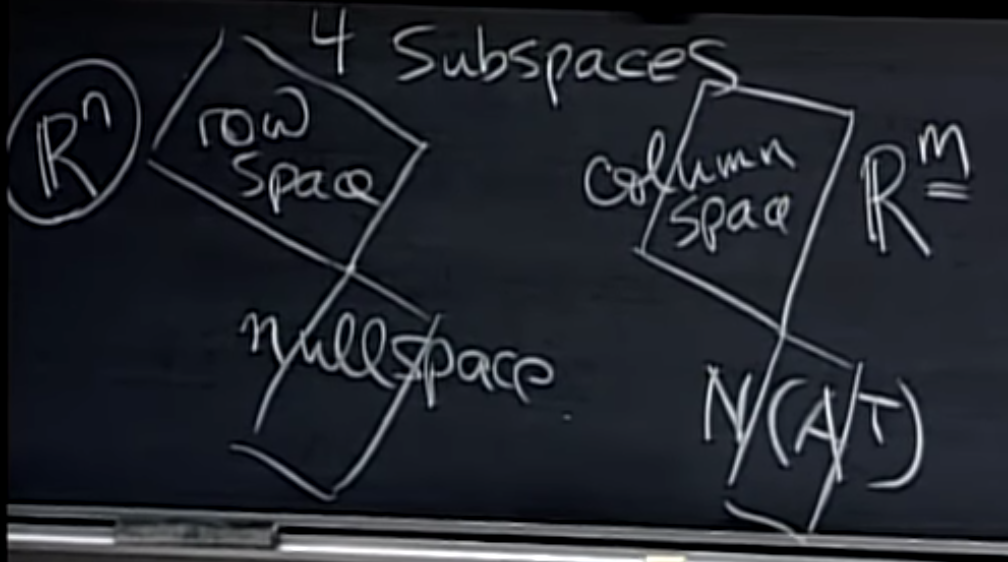
四个基本的子空间和$R^n到R^{n \times n}$的扩展
新向量空间的基础,秩为1的矩阵,小世界图画